Theta Star Planner 설정
zeta2_navigation_theta.launch.py 를 실행하면 체험해 볼 수 있습니다.
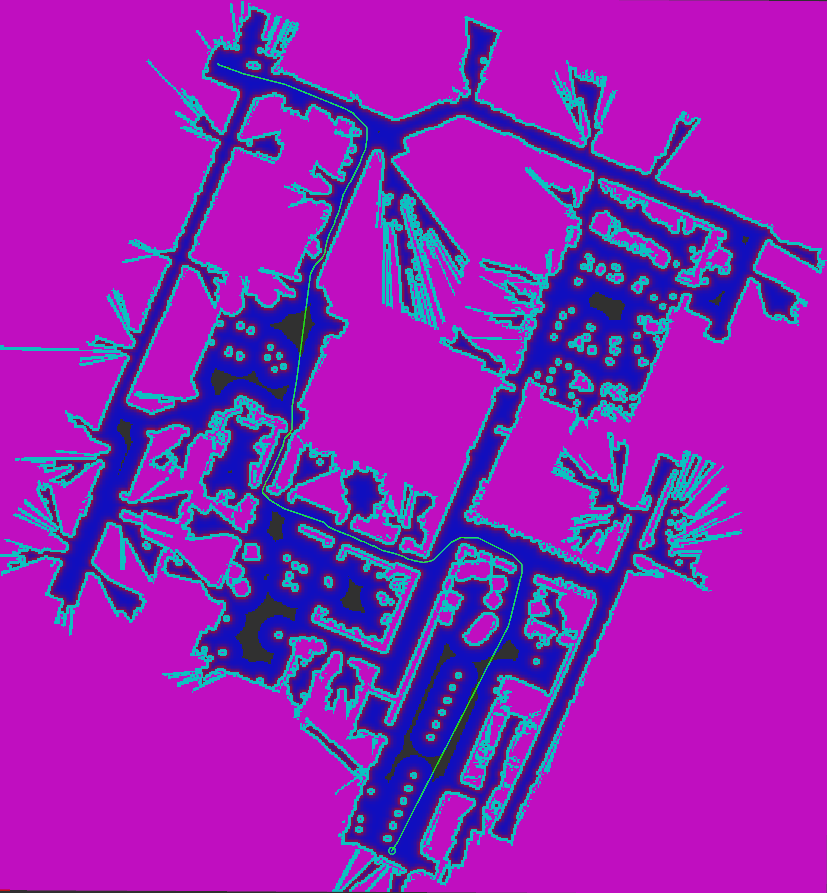
Theta Star Planner는 A*를 사용하여 어떤 각도의 선분에 초점을 맞춘 경로를 계획하는 Theta* 경로 계획기를 구현합니다.
아래 예제에서는 계획기가 약 46ms(평균 값)의 시간이 걸렸고 길이가 87.5m인 경로를 계산했습니다.
<name> 은 이 유형에 선택된 해당 계획기 플러그인 ID입니다.
매개변수
계획기의 매개변수는 다음과 같습니다:
<name>.how_many_corners타입
기본값
int
8
- 설명
4-연결(위, 아래, 왼쪽, 오른쪽) 및 8-연결(모든 인접한 셀) 그래프 확장 사이에서 선택합니다. 허용되는 값은 4와 8입니다.
<name>.w_euc_cost타입
기본값
double
1.0
- 설명
경로의 길이에 적용되는 가중치입니다.
<name>.w_traversal_cost타입
기본값
double
2.0
- 설명
고비용 노드가 얼마나 엄격하게 처벌되는지를 조정합니다. 위의 g(neigh) 방정식에서 볼 수 있듯이, 비용 관련 구성 요소는 코스트 함수의 이차 곡선을 형성하므로 이 매개변수를 증가시키면 곡선이 더 가팔라져서 그래프가 가팔라지면(비용이 높아질수록) 노드들 간의 차이(그래프가 가팔라질 때 비용의 차이가 증가합니다.)가 커집니다.
<name>.use_final_approach_orientation타입
기본값
bool
false
- 설명
참이면, 계획기가 생성한 경로의 마지막 포즈의 방향이 접근 방향으로 설정됩니다. 즉, 경로의 마지막 두 점을 연결하는 벡터의 방향입니다.
<name>.allow_unknown타입
기본값
bool
True
- 설명
알려지지 않은 공간에서의 계획을 허용할지 여부입니다.
Note
이 저장소 링크의 README 파일을 확인하여 이 계획기를 조정하는 방법에 대해 더 잘 이해하십시오. 이 계획기를 사용하려면 코스트맵의 cost_scaling_factor 매개변수도 조정하여 좋은 결과를 얻을 수 있습니다.
Example
planner_server:
ros__parameters:
expected_planner_frequency: 20.0
use_sim_time: True
planner_plugins: ["GridBased"]
GridBased:
plugin: "nav2_theta_star_planner/ThetaStarPlanner"
how_many_corners: 8
w_euc_cost: 1.0
w_traversal_cost: 2.0
w_heuristic_cost: 1.0
다음 단계
다음 과정에선 다양한 컨트롤러 에 대해서 알아보겠습니다.