Navigation2 Start
목표: navigation2 를 처음 사용할 때 가장 필수적인 요소들을 배워보고 zeta2 로봇에는 어떻게 사용되어 지는지 알아본다.
전제조건
앞의 과정을 다 끝내고 와야 합니다. ROS2에 대한 기본 개념이 없으면 이해하기 힘들 수 있습니다.
우리는 기존에 zeta2_bringup 패키지의 zeta2_bringup.launch.py 파일을 실행하는 것으로 로봇이 기본적인 모든 구성 요소들을 불러올 수 있었습니다.
이 시간에는 navigation2 을 사용하기 위한 각각의 필수적 데이터들과 그 것들이 zeta2_bringup 안에 어떻게 들어가 있는지 알아보는 시간을 가지겠습니다.
1 navigation2 를 위한 로봇 셋업
navigation2 를 사용하기 위해선 다양한 요소들이 있지만 간단한 요소들로도 충분히 사용할 수 있습니다.
가장 먼저 가장 중요한 TF 입니다. 이것은 Sensor 나 Odometry 같은 다양한 소스에서 들어오는 정보들을 좌표 프레임으로 사용하는 것입니다.
다음은 Odometry(오도메트리) 입니다. Odometry 는 일반적으로 휠인코더, IMU, Lidar, Radar 또는 Vio와 같은 센서 데이터를 사용하여 로봇의 자세와 속도를 추정하는 방법을 제공합니다.
다음은 Sensor(센서) 입니다. Sensor 는 로봇이 주변 환경을 인식하고 파악하기 위해 사용되는 장치로, lidar, radar, RGB 카메라, 깊이 카메라, IMU, GPS 등이 일반적으로 사용됩니다.
다음은 Footprint 입니다. Footprint 는 로봇의 2D 모양을 정의하여 Nav2의 경로 계획 알고리즘이 충돌을 피하도록 하는데 사용됩니다.
하지만 우리의 로봇은 base_link가 footprint를 대체할 수 있게 설정하였습니다.
마지막으로 Navigation plugins 입니다. 로봇의 경로 계획 및 제어를 위해 다양한 알고리즘을 사용할 수 있게 해주는 도구 입니다.
1.1 TF
TF 는 이미 앞선 TF2 강의에서 배웠었습니다.
이 시간에는 자율주행에 필요한 가장 필수적인 TF 에 대해서 설명하겠습니다.
map=>odom사이의TF입니다.
이 TF 는 로봇의 전역 위치를 나타내는 map 과 로봇의 상대적인 운동을 추적하는 odom 간의 관계를 정의합니다.
map 은 로봇이 움직이는 환경의 전역 지도를 나타내며, odom 은 로봇의 상대적인 이동을 추적합니다.
이 TF 를 통해 로봇의 운동학적 위치를 전역 지도에 매핑하여 로봇의 위치를 정확하게 추정할 수 있습니다.
또한 이 TF 는 SLAM(Simultaneous localization and Mapping) 알고리즘이나 AMCL(Adaptive Monte Carlo localization) 과 같은 로봇의 로컬라이제이션 시스템에 의해 생성됩니다.
자율주행을 사용하는 navigation2 에서는 AMCL 을 사용하여 생성해준다고 볼 수 있습니다.
odom=>base_link사이의TF입니다.
이 TF 는 로봇의 운동학적 위치를 나타내는 odom 과 로봇의 기준점인 base_link 간의 관계를 정의합니다.
odom 은 로봇의 상대적인 이동을 추적하고 기록하는 데 사용됩니다.
이 TF 를 통해 로봇의 운동학적 위치를 로봇의 기준점으로 변환하여 제어 및 위치 추정에 사용할 수 있습니다.
zeta2 로봇의 경우엔 zeta2_edu_devel/zeta2_bringup/scripts/odometry.py 파일에서 odometry 도 생성하고 TF 도 생성합니다.
이 때 생성할 때의 코드를 보면 TransformBroadcaster 을 사용하여 생성한다는 것을 확인할 수 있습니다.
base_link=>base_laser사이의TF입니다.
이 TF 는 로봇의 기본적인 구조를 설명합니다.
base_link 는 로봇의 기준점으로, 보통 로봇의 중심에 해당합니다.
base_laser 는 로봇에 장착된 레이저 센서의 위치를 나타냅니다.
이 TF 를 통해 레이저 센서의 측정 데이터를 로봇의 기준점으로 변환하여 사용할 수 있습니다.
이 TF 의 경우엔 로봇이 한 번 조립되면 로봇의 중심과 레이저 센서의 위치가 변경되지 않기 때문에 정적(static)으로 지정됩니다.
이 TF 는 로봇의 초기 설치시 정확한 위치를 기반으로 설정되며, 로봇의 구성이 변경되지 않는 한 변하지 않습니다.
zeta2 로봇의 경우엔 zeta2_edu_devel/zeta2_bringup/launch/zeta2_state_publisher.launch.py 파일에서 TF 를 생성합니다.
이렇게 3가지 정도의 구성이 필수적인 요소들이라고 볼 수 있습니다.
URDF 라는 것을 사용하면 좀 더 다양한 TF 구성요소를 쉽게 생성할 수 있습니다. 하지만 이 로봇의 경우엔 자원을 최대한 적게 사용하기 위해 가장 필수적인 요소들로만 구성을 했습니다.
URDF 로 구성하는 것을 따로 학습 해보고 싶다면 Setting Up The URDF 을 참고하시길 바랍니다.
이 과정에선 zeta2 로봇을 기준으로 작성했기 때문에 내용은 생략되었습니다.
1.2 Odometry(odom)
우리의 로봇에서는 역시나 zeta2_bringup.launch.py 를 사용하면 알아서 odometry 를 생성해 주었습니다.
이번 시간엔 이 결과가 어떻게 나오게 되었는지 간단하게 알아보겠습니다.
일단 먼저, Odometry(odom) 는 로봇의 운동학적인 위치와 자세를 추정하는 데 사용되는 정보입니다. 이 정보는 보통 선속도와 각속도를 기반으로 계산되며, 로봇의 이동과 회전을 추적하여 현재 위치와 자세 를 파악합니다.
예를 들어, 선속도 와 각속도 를 이용하여 로봇의 이동 거리 와 회전 각도 를 계산할 수 있습니다. 이렇게 계산된 이동 거리 와 회전 각도 를 이전 위치와 자세에 누적함으로써 현재의 위치와 자세 를 추정할 수 있습니다. 이러한 작업은 로봇이 이동하는 동안 계속해서 이루어지며, 오도메트리 정보는 로봇의 위치 추정뿐만 아니라 제어 및 경로 계획에도 사용됩니다.
ROS에서는 오도메트리 정보는 주로 odom 이라는 토픽을 통해 게시됩니다. 이 정보는 보통 로봇의 현재 위치와 자세를 나타내는 Pose 와 Twist 메시지로 표현됩니다. Pose 메시지 는 로봇의 위치와 자세를 나타내고, Twist 메시지 는 로봇의 선속도와 각속도를 나타냅니다.
따라서 오도메트리는 로봇의 운동을 추적하고 제어하는 데 중요한 역할을 합니다. 오도메트리 정보를 정확하게 추정함으로써 로봇은 자신의 위치를 파악 하고 목표 지점으로 이동할 수 있습니다.
1.2.1 zeta2 로봇에서의 odom
zeta2 로봇에서 odometry 를 생성하는 파일의 위치는 zeta2_edu_devel/zeta2_bringup/scripts/odometry.py 입니다. 내용을 살펴보겠습니다.
Odometry 를 업데이트하기 위해서 모터 보드 와 인터페이스 보드 에서 나오는 데이터를 활용합니다. 모터 보드 에서는 선속도(v) 와 각속도(w) 를, 인터페이스 보드에서는 IMU 데이터를 받습니다.
이 두 가지 데이터를 조합하여 로봇의 위치와 자세를 추정하고 제어합니다.
- 모터 보드 데이터 해석:
모터 보드에서 받은 데이터를 해석하여선속도(v)와각속도(w)를 추출합니다.선속도는 로봇의 직진 또는 후진 속도를 나타내며,각속도는 로봇의 회전 속도를 나타냅니다.이러한 데이터를 기반으로 로봇의 운동을 계산합니다.
- IMU 데이터 활용:
인터페이스 보드에서 받은IMU데이터를 사용하여 로봇의 자세를 보정합니다.IMU데이터는 로봇의 방향을 나타내는 각도 정보를 제공합니다. 이를 활용하여 로봇의 이동 방향에 대한 보정을 수행합니다.
- 오도메트리 업데이트:
선속도와각속도를 이용하여 로봇의이동량을 계산합니다.이동량과IMU에서 얻은회전값을 조합하여로봇의 위치와 자세를 업데이트합니다.최종적으로 계산된 위치와 자세 정보를 이용하여
오도메트리를 업데이트합니다.
이렇게 모터 보드와 인터페이스 보드에서 받은 데이터를 조합하여 로봇의 운동을 추정하고 오도메트리 를 업데이트합니다.
이러한 과정을 통해 로봇은 자신의 위치와 자세를 추정하고, 외부로 이 정보를 전달하여 제어될 수 있습니다.
일반적인 센서 메시지
nav2를 설정할 때 일반적인 sensor_msgs 들이 있습니다. 각각에 대해서 간단한 설명을 알려드리겠습니다.
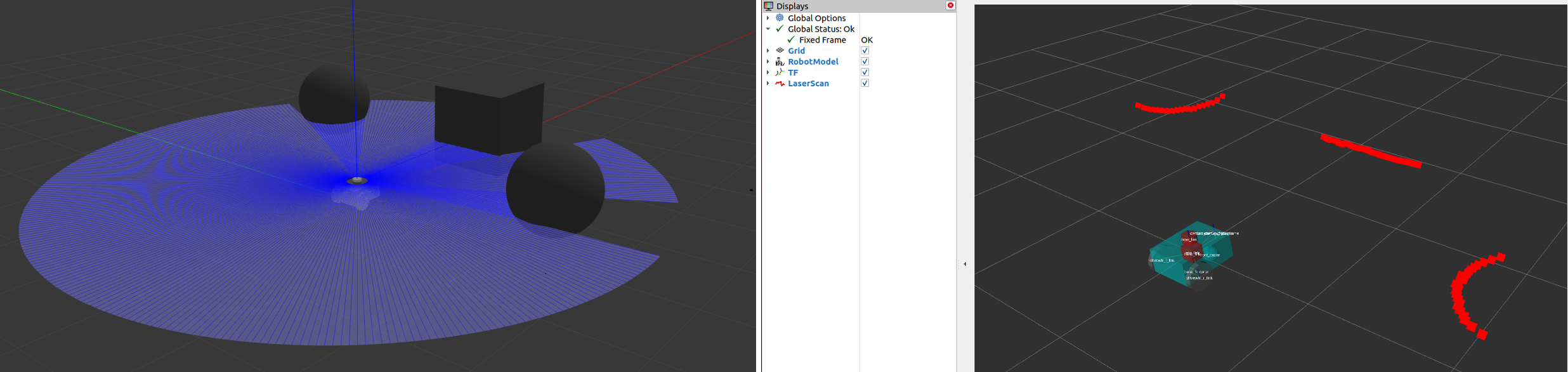
sensor_msgs/LaserScan
이 메시지는 평면 레이저 거리 측정기에서의 단일 스캔을 나타냅니다. 이 메시지는 localization 및 mapping을 위해 slam_toolbox 및 nav2_amcl 에서 사용되거나, perception을 위해 nav2_costmap_2d 에서 사용됩니다.
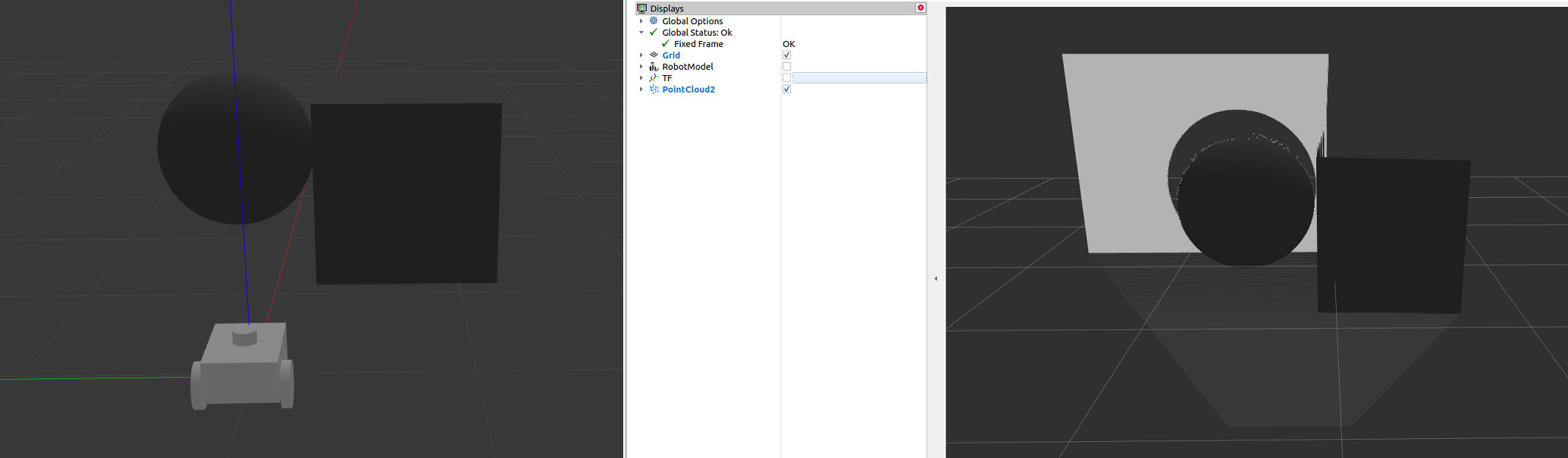
sensor_msgs/PointCloud2
이 메시지는 3D 점의 집합을 보유하며, 각 점에 대한 선택적인 추가 정보를 포함합니다. 이는 3D 라이다, 2D 라이다, 깊이 카메라 등에서 올 수 있습니다.
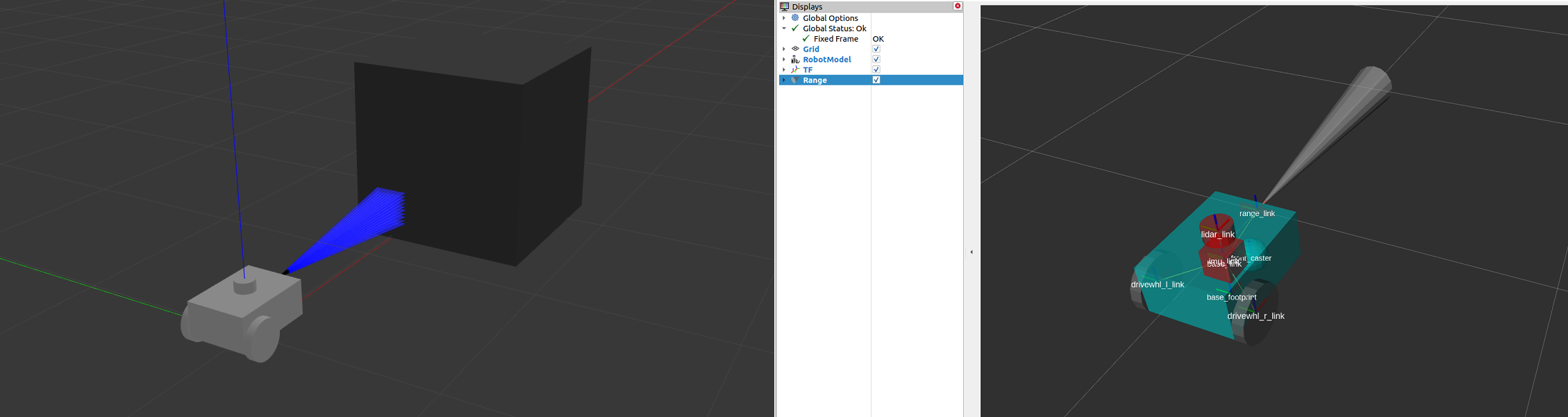
sensor_msgs/Range
이 메시지는 에너지를 방출하고 측정된 거리에서 하나의 범위 측정을 보고하는 활성 레인저에서의 단일 범위 읽기입니다. 초음파 센서, 적외선 센서 또는 1D 레인지 파인더가 이 메시지를 사용하는 예입니다.
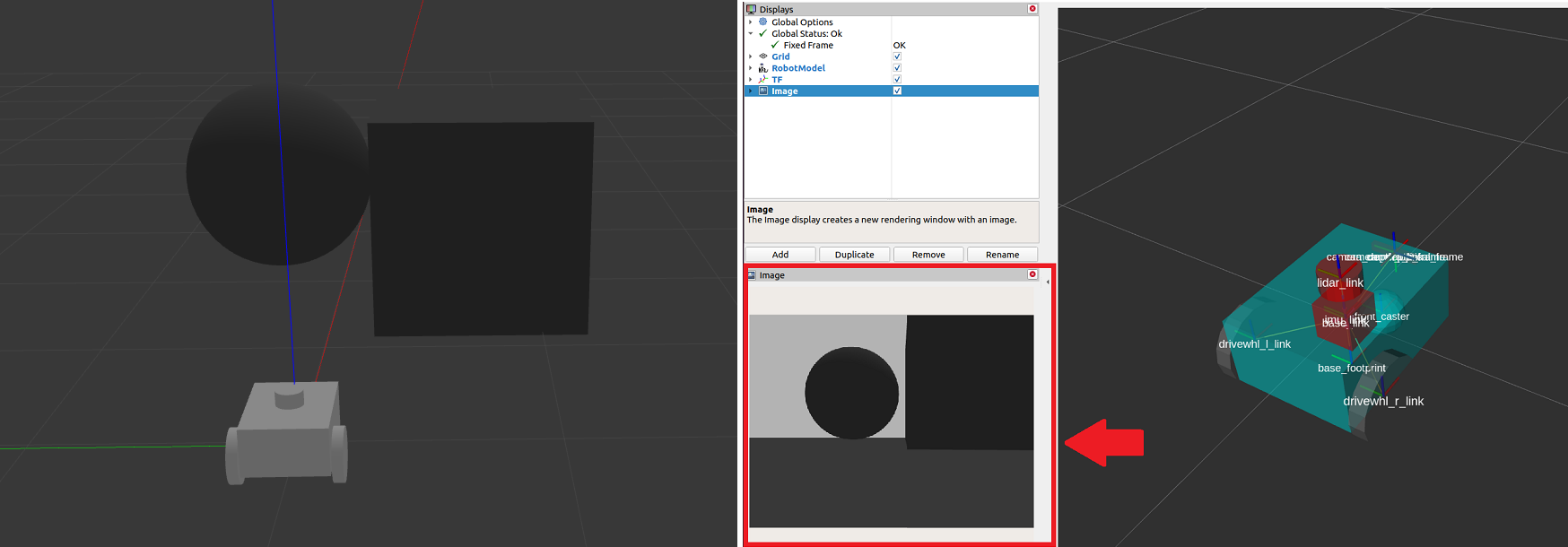
sensor_msgs/Image
이 메시지는 RGB 또는 깊이 카메라에서의 센서 읽기를 나타냅니다. RGB 또는 범위 값에 해당합니다.
매핑과 로컬라이제이션
방금 전의 센서들을 가지고 맵을 생성하고 로봇을 맵에서 localization 할 수 있습니다. slam 할 때 사용했던 slam_toolbox 패키지 또한 localization 할 수 있는 도구 중 하나 입니다.
하지만 우린 nav2_amcl 을 사용해서 현재 위치를 구현했습니다. 이 것 또한 로봇의 위치와 방향을 맵 상에서 추정하는 패키지 입니다.
slam_toolbox 와 nav2_amcl 모두 라이다 스캔 센서에서 정보를 사용하여 로봇 환경을 인식할 수 있습니다.
Costmap 2D Overview
Costmap 2D는 로봇의 주변 환경을 효과적으로 표현하여 안전한 이동을 가능하게 하는 데 중요한 역할을 합니다.
주로 라이다(LiDAR) 센서로부터 수집된 데이터를 기반으로 작동하며, 다음과 같은 특징을 가집니다.
- 환경 표현:
로봇의 주변 환경은 Costmap 2D를 통해 격자 형태의 그리드로 나타납니다. 각 격자 셀은 0에서 254 사이의 값으로 표현되며, 이는 해당 셀을 통과하는 데 필요한 비용을 의미합니다. 셀의 값에 따라 무료(0), 치명적으로 점유(254)된 곳을 나타내며, 이를 통해 로봇은 안전한 경로를 계획하고 이동할 수 있습니다.
- 구성:
Costmap 2D는 여러 레이어로 구성되어 있습니다.
정적 레이어(static layer),장애물 레이어(obstacle layer),복셀 레이어(voxel layer),팽창 레이어(inflation layer)등이 주로 사용됩니다. 각 레이어는 플러그인 기반으로 작동하며, 사용자가 필요에 따라 쉽게 사용자 정의할 수 있습니다.- 주요 레이어:
정적 레이어: SLAM을 통해 생성된 지도 정보를 나타냅니다.
장애물 레이어: 라이다나 포인트 클라우드와 같은 센서로 감지된 장애물을 표현합니다.
복셀 레이어: 3D 데이터를 처리하며, 주로 3D 라이다 센서 정보를 활용합니다.
팽창 레이어: 로봇의 형태를 고려하여 장애물 주변에 추가 비용을 부여하여 충돌을 피합니다.
이렇게 Costmap 2D를 설정하고 구성함으로써 로봇은 주변 환경을 인식하고 안전하게 이동할 수 있습니다.
1.4 Footprint
Footprint 는 로봇의 2D 모양을 바닥으로 투영한 것으로, Nav2에서 경로를 계산하거나 계획하는 동안 충돌을 피하기 위해 주로 사용됩니다.
이 작업에 참여하는 알고리즘은 로봇이 코스트맵의 장애물과 충돌하지 않도록 보장합니다.
우리의 로봇에선 footprint 자리에 base_link 로 사용을 하고 있습니다. 로봇이 낮아서 유사하게 사용해도 상관 없다고 생각했기 때문입니다.
반경은 로봇의 반지름으로 설정을 하여서 0.16 이 나왔고 작은 로봇은 또 다른 값으로 사용할 수 있습니다.
footprint 는 local_costmap 과 global_costmap 둘 다 사용 되는데 일반적으로 global_costmap 에서는 원형, local_costmap 에서는 다각형이 사용됩니다.
하지만 우리 로봇은 둘 다 원형을 사용했습니다. 가장 큰 이유는 계산을 줄이고자 함이고, 다른 이유는 형태도 원형과 유사하기 때문입니다.
Footprint 는 Nav2의 경로 탐색 알고리즘에 중요한 역할을 합니다.
플래너와 컨트롤러 서버
내비게이션 알고리즘은 ROS 액션 서버에서 실행되는 플러그인을 통해 Nav2에 구현됩니다.
이 부분에서는 내비게이션 스택의 핵심인 플래너 및 컨트롤러 서버에 대해 설명합니다.
이러한 서버는 각각 특정 액션 또는 로봇 상태에 대해 맞춤 설정된 복수의 알고리즘 플러그인을 구현할 수 있습니다.
이 가이드에서는 로봇 유형 및 환경에 따라 다른 알고리즘을 강조할 것입니다.
플래너 서버 는 로봇의 경로를 계산하는 알고리즘을 구현하는 것이다.
예를 들어, 하나의 플러그인은 두 근접한 위치 간의 간단한 최단 경로를 계산하고, 다른 플러그인은 로봇 환경을 포괄하는 위치로의 경로를 계산할 수 있습니다.
컨트롤러 서버 는 로봇이 지역 환경에서 작업을 완료하는 데 필요한 적절한 제어 노력을 생성합니다.
이러한 작업에는 플래너 서버에서 생성된 경로를 따라가는 것, 이 경로에 따라 동적 장애물을 피하는 것, 그리고 도킹 스테이션에서 충전하는 것 등이 포함될 수 있습니다.
다음 내용에서 이 내용은 좀 더 자세히 다뤄볼 것이다.
요약
navigation2 를 사용하기 위한 기본적인 구성요소들을 배웠습니다.
이러한 구성 요소들이 정확히 설정되고 데이터가 올바르게 처리되어야 자율 주행이 원활하게 이루어질 수 있습니다.
더 자세한 설정 및 디버깅이 필요할 수 있지만, 이러한 기본적인 요소들을 이해하고 설정하는 것은 중요합니다.
다음 단계
다음 과정에선 사용할 수 있는 플래너에 대해서 알아보겠습니다.