하드웨어 스펙
목표: 로봇의 기본 구성 요소를 확인한다.
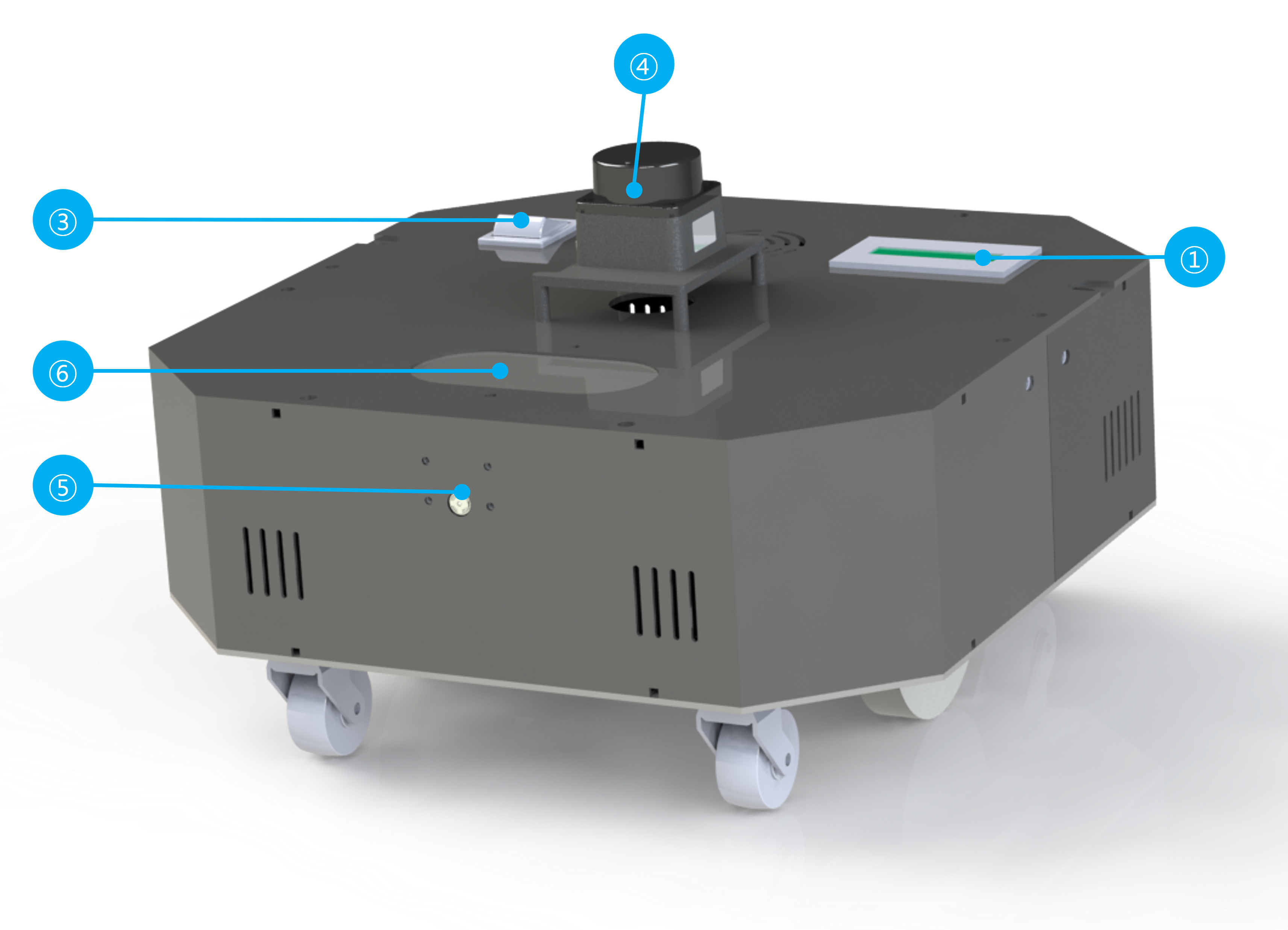

주요 부품들
로봇의 메인 부품들이다.
Product Picture |
Product Description |
|---|---|
|
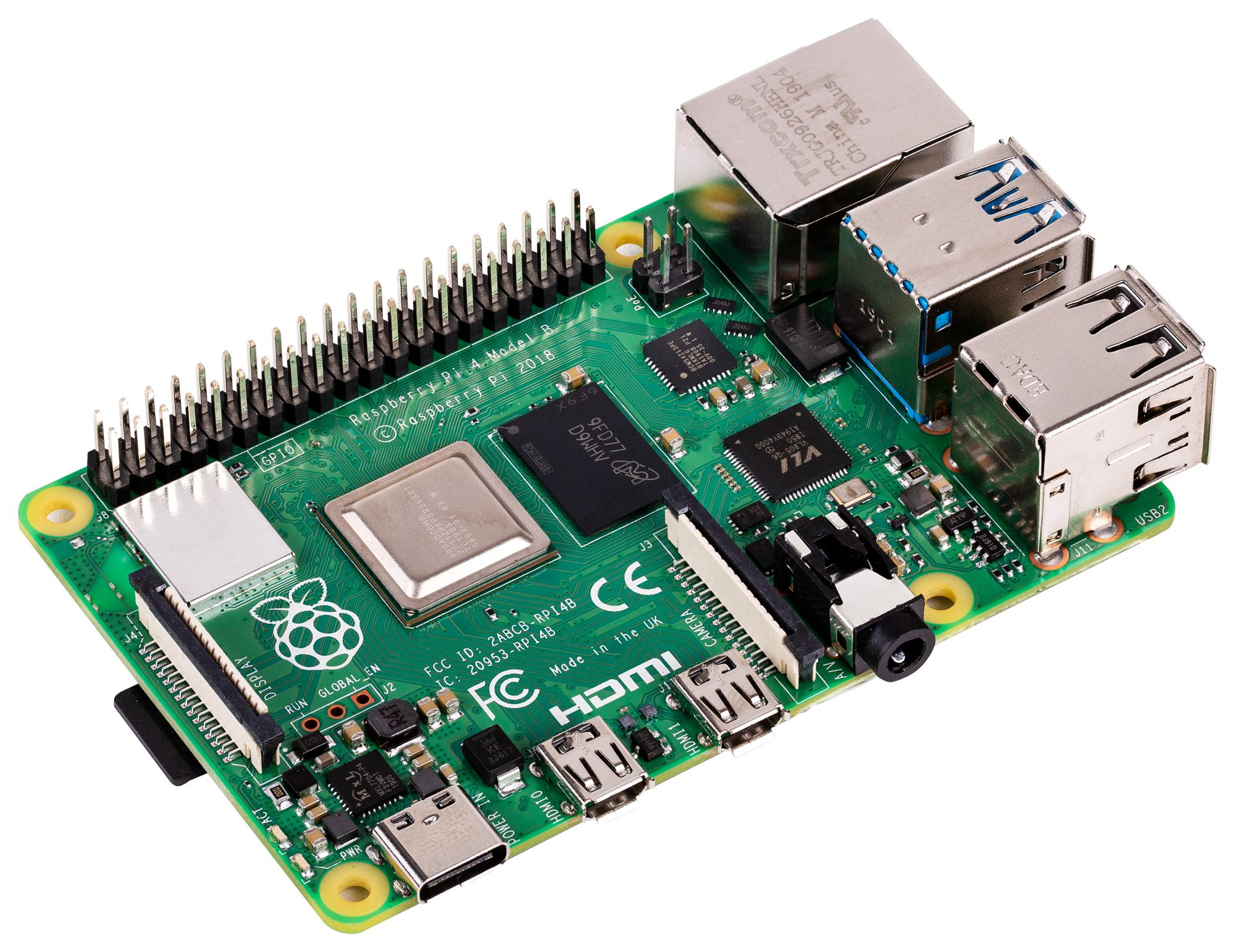
Raspberry Pi 4 (8GB)
CPU : Quad core Cortex-A72 (ARM v8) 64-bit SoC @ 1.8GHz
GPU : Broadcom VideoCore VI
Memory : 8GB LPDDR4-3200 SDRAM
Storage : Micro SD
|
|
Dimensions: 38*38*34.3mm
Detection range: 0.02~12m
Angular resolution: 0.2°~1.0°
The laser wavelength: 905nm
Measurement frequency: 4500Hz
Sweep frequency: 5~13Hz
Protection grade: IPX-4
Measuring Angle: 0°~360°
|
|
Camera Module
Resolution : 8mega pixel
Sensor : Sony IMX 219 PQ CMOS
|
|
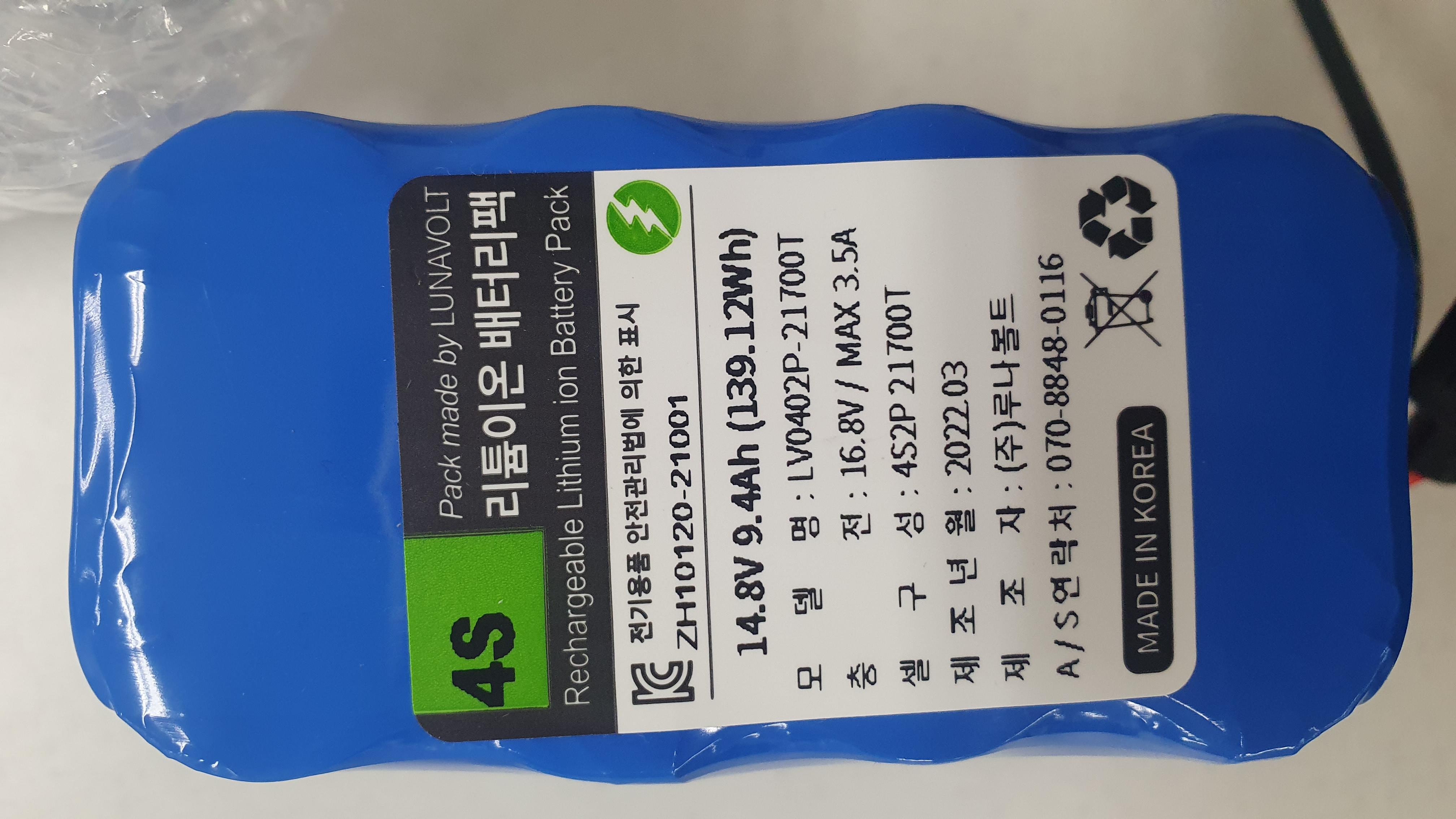
Lithium ion battery pack
Charge : 16.8V / 3.5A
Output: 14.8V / 9.4Ah (139.12Wh)
|


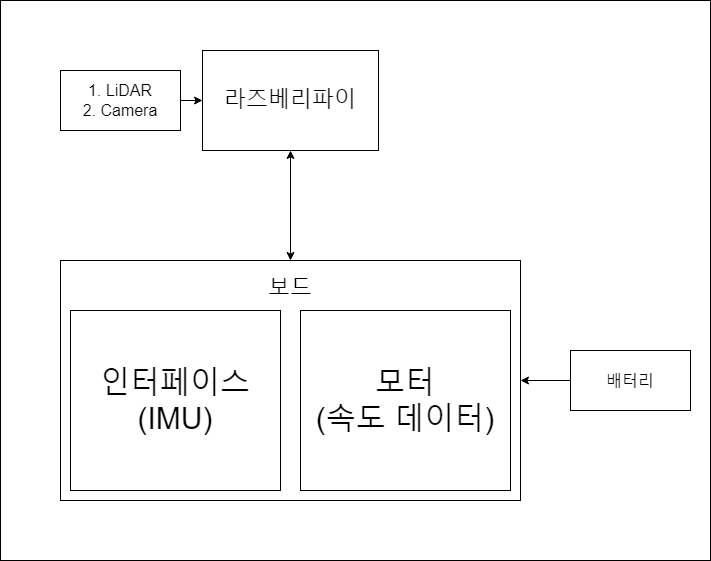
요약
로봇의 구성하는 하드웨어와 어떻게 서로 연결되어 있는지 확인해 봤습니다.