대규모 프로젝트 관리
목표: ROS 2 런치 파일을 사용하여 대규모 프로젝트를 관리하는 데 사용되는 모범 사례를 학습합니다.
튜토리얼 레벨: 중급
소요 시간: 20분
목차
배경
이 튜토리얼에서는 대규모 프로젝트를 관리하는 데 도움이 되는 몇 가지 유용한 팁과 ROS 2 런치 파일을 사용하는 방법에 대해 설명합니다. 주요 초점은 런치 파일을 어떻게 구조화하여 가능한 한 다양한 상황에서 재사용할 수 있도록 하는 것입니다. 또한 매개변수, YAML 파일, 리매핑, 네임스페이스, 기본 인수 및 RViz 구성과 같은 다양한 ROS 2 런치 도구의 사용 예제를 다룹니다.
전제 조건
이 튜토리얼에서는 turtlesim 및 turtle_tf2_py 패키지를 사용합니다.
또한 ament_python 빌드 유형의 launch_tutorial 이라는 새로운 패키지를 만들었다고 가정합니다.
소개
로봇에서의 대규모 응용 프로그램은 일반적으로 여러 연결된 노드로 구성되며 각 노드에는 많은 매개변수가 있을 수 있습니다.
거북 시뮬레이터의 여러 거북을 시뮬레이션하는 것이 좋은 예입니다.
거북 시뮬레이션에는 여러 거북 노드, 월드 구성 및 TF 브로드캐스터 및 리스너 노드가 포함됩니다.
모든 노드 사이에는 이러한 노드의 동작 및 외관에 영향을 주는 많은 ROS 매개변수가 있습니다.
ROS 2 런치 파일을 사용하면 모든 노드를 시작하고 노드로 매개변수를 설정할 수 있는 한 곳에서 시작할 수 있습니다.
튜토리얼의 끝에는 launch_turtlesim.launch.py 런치 파일을 launch_tutorial 패키지의 launch 폴더에 빌드합니다.
이 런치 파일은 두 개의 거북 시뮬레이션을 시뮬레이션하는 다양한 노드를 시작하고 TF 브로드캐스터 및 리스너를 시작하며 매개변수를 로드하고 RViz 구성을 시작합니다.
이 튜토리얼에서는 이 런치 파일과 관련된 모든 기능을 살펴보겠습니다.
런치 파일 작성
1 최상위 구성
런치 파일을 작성하는 과정에서의 주요 목표 중 하나는 가능한 한 재사용 가능하도록 만드는 것입니다. 이는 관련된 노드 및 구성을 별도의 런치 파일로 묶어서 수행할 수 있습니다. 그런 다음 특정 구성에 대한 최상위 런치 파일을 작성할 수 있습니다. 이렇게 하면 동일한 로봇 간의 이동을 런치 파일을 전혀 변경하지 않고 수행할 수 있습니다. 실제 로봇에서 시뮬레이션으로 이동하는 것과 같은 변경도 몇 가지 변경만으로 수행할 수 있습니다.
이제 이것이 가능하게 만드는 최상위 런치 파일 구조를 살펴보겠습니다.
먼저 별도의 런치 파일을 호출하는 런치 파일을 만들어 보겠습니다.
이를 위해 launch_tutorial 패키지의 /launch 폴더에 launch_turtlesim.launch.py 파일을 생성합니다.
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
def generate_launch_description():
turtlesim_world_1 = IncludeLaunchDescription(
PythonLaunchDescriptionSource([os.path.join(
get_package_share_directory('launch_tutorial'), 'launch'),
'/turtlesim_world_1.launch.py'])
)
turtlesim_world_2 = IncludeLaunchDescription(
PythonLaunchDescriptionSource([os.path.join(
get_package_share_directory('launch_tutorial'), 'launch'),
'/turtlesim_world_2.launch.py'])
)
broadcaster_listener_nodes = IncludeLaunchDescription(
PythonLaunchDescriptionSource([os.path.join(
get_package_share_directory('launch_tutorial'), 'launch'),
'/broadcaster_listener.launch.py']),
launch_arguments={'target_frame': 'carrot1'}.items(),
)
mimic_node = IncludeLaunchDescription(
PythonLaunchDescriptionSource([os.path.join(
get_package_share_directory('launch_tutorial'), 'launch'),
'/mimic.launch.py'])
)
fixed_frame_node = IncludeLaunchDescription(
PythonLaunchDescriptionSource([os.path.join(
get_package_share_directory('launch_tutorial'), 'launch'),
'/fixed_frame_broadcaster.launch.py'])
)
rviz_node = IncludeLaunchDescription(
PythonLaunchDescriptionSource([os.path.join(
get_package_share_directory('launch_tutorial'), 'launch'),
'/turtlesim_rviz.launch.py'])
)
return LaunchDescription([
turtlesim_world_1,
turtlesim_world_2,
broadcaster_listener_nodes,
mimic_node,
fixed_frame_node,
rviz_node
])
이 런치 파일은 다른 런치 파일 세트를 포함합니다. 각 포함된 런치 파일은 노드, 매개변수 및 필요한 경우 중첩된 포함을 포함하는 것과 관련된 하나의 시스템 부분과 관련됩니다. 구체적으로 두 개의 거북 시뮬레이션 월드, TF 브로드캐스터, TF 리스너, 미미크 및 고정 프레임 브로드캐스터 및 RViz 노드를 시작합니다.
Note
설계 팁: 최상위 런치 파일은 짧아야하며, 응용 프로그램의 하위 구성요소에 해당하는 다른 파일을 포함하고 일반적으로 변경되는 매개변수에 포함되어야 합니다.
나중에 보게 되겠지만 다음과 같은 방법으로 런치 파일을 작성하면 시스템의 하나를 쉽게 바꿀 수 있습니다. 하지만 성능과 사용상의 이유로 일부 노드나 런치 파일을 따로 런치해야 하는 경우도 있습니다.
Note
디자인 팁: 응용 프로그램이 얼마나 많은 최상위 런치 파일이 필요한지 결정할 때 어떤 트레이드오프가 있는지 고려하십시오.
2 매개변수
2.1 런치 파일에서 매개변수 설정
첫 번째 터틀심 시뮬레이션을 시작하는 런치 파일을 작성하여 시작하겠습니다. 먼저 turtlesim_world_1.launch.py 라는 새 파일을 만듭니다.
from launch import LaunchDescription
from launch.actions import DeclareLaunchArgument
from launch.substitutions import LaunchConfiguration, TextSubstitution
from launch_ros.actions import Node
def generate_launch_description():
background_r_launch_arg = DeclareLaunchArgument(
'background_r', default_value=TextSubstitution(text='0')
)
background_g_launch_arg = DeclareLaunchArgument(
'background_g', default_value=TextSubstitution(text='84')
)
background_b_launch_arg = DeclareLaunchArgument(
'background_b', default_value=TextSubstitution(text='122')
)
return LaunchDescription([
background_r_launch_arg,
background_g_launch_arg,
background_b_launch_arg,
Node(
package='turtlesim',
executable='turtlesim_node',
name='sim',
parameters=[{
'background_r': LaunchConfiguration('background_r'),
'background_g': LaunchConfiguration('background_g'),
'background_b': LaunchConfiguration('background_b'),
}]
),
])
이 런치 파일은 터틀심 노드인 turtlesim_node 를 시작하며, 노드에 정의된 시뮬레이션 구성 매개변수를 정의하고 전달합니다.
2.2 YAML 파일에서 매개변수 로딩
두 번째 런치에서는 다른 구성으로 두 번째 터틀심 시뮬레이션을 시작합니다. 이제 turtlesim_world_2.launch.py 파일을 만듭니다.
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch_ros.actions import Node
def generate_launch_description():
config = os.path.join(
get_package_share_directory('launch_tutorial'),
'config',
'turtlesim.yaml'
)
return LaunchDescription([
Node(
package='turtlesim',
executable='turtlesim_node',
namespace='turtlesim2',
name='sim',
parameters=[config]
)
])
이 런치 파일은 YAML 구성 파일에서 직접로드하는 매개변수 값을 사용하여 동일한 turtlesim_node 를 시작합니다.
YAML 파일에 인수 및 매개변수를 정의하면 많은 변수를 저장하고 로드하기가 쉬워집니다.
또한 현재 ros2 param 목록에서 YAML 파일을 쉽게 내보낼 수 있습니다.
자세한 내용은 매개변수 이해 튜토리얼을 참조하십시오.
이제 패키지의 /config 폴더에 turtlesim.yaml 라는 구성 파일을 만들어 런치 파일에서 로드하도록합니다.
/turtlesim2/sim:
ros__parameters:
background_b: 255
background_g: 86
background_r: 150
이제 turtlesim_world_2.launch.py 런치 파일을 시작하면 미리 구성된 배경 색상을 사용하여 turtlesim_node 을 시작합니다.
매개변수 사용 및 YAML 파일 사용에 대한 자세한 내용은 매개변수 이해 튜토리얼을 참조하십시오.
2.3 YAML 파일에서 와일드카드 사용
같은 매개변수를 여러 노드에서 설정하려는 경우가 있습니다. 이러한 노드는 다른 네임스페이스 또는 이름을 가질 수 있지만 여전히 동일한 매개변수를 가질 수 있습니다. 네임스페이스와 노드 이름을 명시적으로 정의하는 별도의 YAML 파일을 정의하는 것은 효율적이지 않습니다. 와일드카드 문자를 사용하여 텍스트 값에서 알 수 없는 문자에 대한 대체 역할을 하는 솔루션을 사용하실 수 있습니다. 와일드카드 구문을 사용하여 여러 다른 노드에 매개변수를 적용할 수 있습니다.
이제 turtlesim_world_3.launch.py 와 비슷한 새로운 런치 파일을 만들어 하나의 turtlesim_node 노드를 더 추가하겠습니다.
...
Node(
package='turtlesim',
executable='turtlesim_node',
namespace='turtlesim3',
name='sim',
parameters=[config]
)
그러나 동일한 YAML 파일을로드하더라도 세 번째 터틀심 월드의 모양에는 영향을주지 않습니다. 그 이유는 해당 매개변수가 다음과 같이 다른 네임스페이스에 저장되어 있기 때문입니다.
/turtlesim3/sim:
background_b
background_g
background_r
따라서 동일한 매개변수를 사용하는 동일한 노드에 대한 새로운 구성을 만드는 대신 와일드카드 구문을 사용할 수 있습니다. /** 는 노드 이름과 네임스페이스의 차이에 관계없이 모든 노드에서 모든 매개변수를 할당합니다.
이제 turtlesim.yaml 파일을 다음과 같이 업데이트하겠습니다. 패키지의 /config 폴더에 있습니다.
/**:
ros__parameters:
background_b: 255
background_g: 86
background_r: 150
이제 메인 런치 파일에 turtlesim_world_3.launch.py 런치 설명을 포함시킵니다.
이러한 런치 설명에서 해당 구성 파일을 사용하면 turtlesim3/sim 및 turtlesim2/sim 노드에서 지정된 값에 대한 background_b, background_g 및 background_r 매개변수가 할당됩니다.
3 네임스페이스
아마도 이미 눈치챘겠지만, turtlesim_world_2.launch.py 파일에서 터틀심 월드의 네임스페이스를 정의했습니다.
고유한 네임스페이스를 사용하면 노드 이름 또는 토픽 이름 충돌없이 두 개의 유사한 노드를 시작할 수 있습니다.
namespace='turtlesim2',
그러나 런치 파일에 많은 수의 노드가 포함되어 있는 경우 각각에 대한 네임스페이스를 정의하는 것은 번거로울 수 있습니다.
이 문제를 해결하려면 PushRosNamespace 액션을 사용하여 각 런치 파일 설명에 대한 전역 네임스페이스를 정의할 수 있습니다.
모든 중첩된 노드는 자동으로 해당 네임스페이스를 상속받게 됩니다.
이를 위해 먼저 turtlesim_world_2.launch.py 파일에서 namespace='turtlesim2' 줄을 제거해야 합니다. 그런 다음 launch_turtlesim.launch.py 파일을 다음과 같이 업데이트해야 합니다.
from launch.actions import GroupAction
from launch_ros.actions import PushRosNamespace
...
turtlesim_world_2 = IncludeLaunchDescription(
PythonLaunchDescriptionSource([os.path.join(
get_package_share_directory('launch_tutorial'), 'launch'),
'/turtlesim_world_2.launch.py'])
)
turtlesim_world_2_with_namespace = GroupAction(
actions=[
PushRosNamespace('turtlesim2'),
turtlesim_world_2,
]
)
마지막으로 return LaunchDescription 문에서 turtlesim_world_2 대신 turtlesim_world_2_with_namespace 을 사용하도록 변경합니다.
결과적으로 turtlesim_world_2.launch.py 런치 설명의 각 노드는 turtlesim2 네임스페이스를 가지게 됩니다.
4 노드 재사용
이제 broadcaster_listener.launch.py 라는 파일을 만들겠습니다.
from launch import LaunchDescription
from launch.actions import DeclareLaunchArgument
from launch.substitutions import LaunchConfiguration
from launch_ros.actions import Node
def generate_launch_description():
return LaunchDescription([
DeclareLaunchArgument(
'target_frame', default_value='turtle1',
description='대상 프레임 이름.'
),
Node(
package='turtle_tf2_py',
executable='turtle_tf2_broadcaster',
name='broadcaster1',
parameters=[
{'turtlename': 'turtle1'}
]
),
Node(
package='turtle_tf2_py',
executable='turtle_tf2_broadcaster',
name='broadcaster2',
parameters=[
{'turtlename': 'turtle2'}
]
),
Node(
package='turtle_tf2_py',
executable='turtle_tf2_listener',
name='listener',
parameters=[
{'target_frame': LaunchConfiguration('target_frame')}
]
),
])
이 파일에서는 target_frame 런치 인수를 선언하고 기본값으로 turtle1 을 사용했습니다.
기본값은 런치 파일이 노드에 전달할 인수를 받거나, 인수가 제공되지 않은 경우 노드에 기본값을 전달합니다.
그런 다음 서로 다른 이름과 매개변수를 사용하여 turtle_tf2_broadcaster 노드를 두 번 시작합니다. 이렇게 하면 충돌없이 동일한 노드를 복제할 수 있습니다.
또한 turtle_tf2_listener 노드를 시작하고 위에서 선언하고 얻은 target_frame 매개변수를 설정합니다.
5 매개변수 오버라이드
broadcaster_listener.launch.py 파일을 최상위 런치 파일에서 호출한 것을 기억하십시오. 이것 외에도 런치 파일에 target_frame 런치 인수를 전달했습니다.
broadcaster_listener_nodes = IncludeLaunchDescription(
PythonLaunchDescriptionSource([os.path.join(
get_package_share_directory('launch_tutorial'), 'launch'),
'/broadcaster_listener.launch.py']),
launch_arguments={'target_frame': 'carrot1'}.items(),
)
이 구문을 사용하면 기본 목표 대상 프레임을 carrot1 로 변경할 수 있습니다.
turtle2 가 carrot1 대신 turtle1 을 따르도록 하려면 launch_arguments 를 정의한 줄을 제거하십시오. 이렇게하면 target_frame 이 기본값인 turtle1 을 할당합니다.
6 리매핑
이제 mimic.launch.py 라는 파일을 만들겠습니다.
from launch import LaunchDescription
from launch_ros.actions import Node
def generate_launch_description():
return LaunchDescription([
Node(
package='turtlesim',
executable='mimic',
name='mimic',
remappings=[
('/input/pose', '/turtle2/pose'),
('/output/cmd_vel', '/turtlesim2/turtle1/cmd_vel'),
]
)
])
이 런치 파일은 mimic 노드를 시작하며, 이 노드는 다른 터틀심을 따르도록 명령을 제공합니다.
이 노드는 /input/pose 토픽에서 대상 포즈를 받도록 설계되었습니다.
이 경우 대상 포즈를 /turtle2/pose 토픽에서 다시 지정하려고 합니다.
마지막으로 /output/cmd_vel 토픽을 /turtlesim2/turtle1/cmd_vel 로 다시 지정합니다.
이렇게 하면 turtlesim2 시뮬레이션 월드의 turtlesim3/sim 이 초기 터틀심 월드의 turtle2 를 따르게 됩니다.
7 구성 파일
이제 turtlesim_rviz.launch.py 라는 파일을 만들겠습니다.
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch_ros.actions import Node
def generate_launch_description():
rviz_config = os.path.join(
get_package_share_directory('turtle_tf2_py'),
'rviz',
'turtle_rviz.rviz'
)
return LaunchDescription([
Node(
package='rviz2',
executable='rviz2',
name='rviz2',
arguments=['-d', rviz_config]
)
])
이 런치 파일은 turtle_tf2_py 패키지에 정의된 구성 파일을 사용하여 RViz를 시작합니다.
이 RViz 구성은 월드 프레임을 설정하고 TF 시각화를 활성화하며 RViz를 위에서 아래로 볼 수 있도록 시작합니다.
8 환경 변수
마지막으로 패키지 내에서 fixed_broadcaster.launch.py 라는 런치 파일을 만듭니다.
from launch import LaunchDescription
from launch.actions import DeclareLaunchArgument
from launch.substitutions import EnvironmentVariable, LaunchConfiguration
from launch_ros.actions import Node
def generate_launch_description():
return LaunchDescription([
DeclareLaunchArgument(
'node_prefix',
default_value=[EnvironmentVariable('USER'), '_'],
description='prefix for node name'
),
Node(
package='turtle_tf2_py',
executable='fixed_frame_tf2_broadcaster',
name=[LaunchConfiguration('node_prefix'), 'fixed_broadcaster'],
),
])
이 런치 파일은 런치 파일 내에서 환경 변수를 호출하는 방법을 보여줍니다. 환경 변수를 사용하여 서로 다른 컴퓨터 또는 로봇의 노드를 구별하기 위한 이름 공간을 정의하거나 푸시할 수 있습니다
런치 파일 실행
1. setup.py 업데이트
setup.py 를 열고 런치 파일을 launch/ 폴더에서 설치하고 구성 파일을 config/ 에서 설치하도록 다음과 같이 추가합니다.
data_files 필드는 다음과 같아야 합니다.
import os
from glob import glob
from setuptools import setup
...
data_files=[
...
(os.path.join('share', package_name, 'launch'),
glob(os.path.join('launch', '*.launch.py'))),
(os.path.join('share', package_name, 'config'),
glob(os.path.join('config', '*.yaml'))),
],
2. 빌드 및 실행
이제 패키지를 빌드하고 다음 명령을 사용하여 최상위 런치 파일을 실행하면 결과를 볼 수 있습니다.
ros2 launch launch_tutorial launch_turtlesim.launch.py
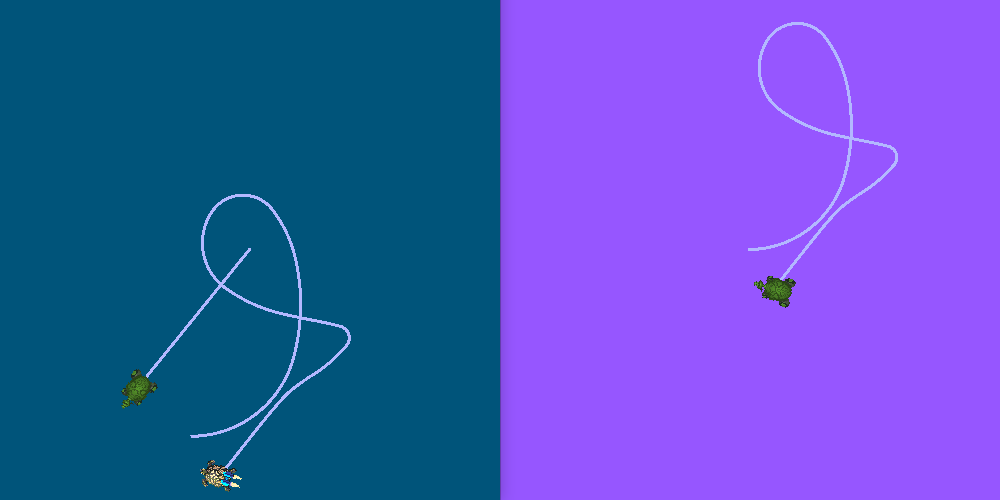
이제 두 개의 터틀심 시뮬레이션이 시작됩니다. 첫 번째 시뮬레이션에는 두 마리의 터틀이 있으며 두 번째 시뮬레이션에는 하나의 터틀이 있습니다.
첫 번째 시뮬레이션에서는 turtle2 가 월드의 왼쪽 아래에 스폰됩니다. 그 목표는 turtle1 프레임과 x-축을 따라 다섯 미터 떨어진 carrot1 프레임에 도달하는 것입니다.
두 번째 시뮬레이션의 turtlesim2/turtle1 은 turtle2 의 동작을 모방하도록 설계되었습니다.
turtle1 을 제어하려면 텔레옵 노드를 실행하십시오.
ros2 run turtlesim turtle_teleop_key
결과적으로 비슷한 이미지를 볼 수 있습니다:
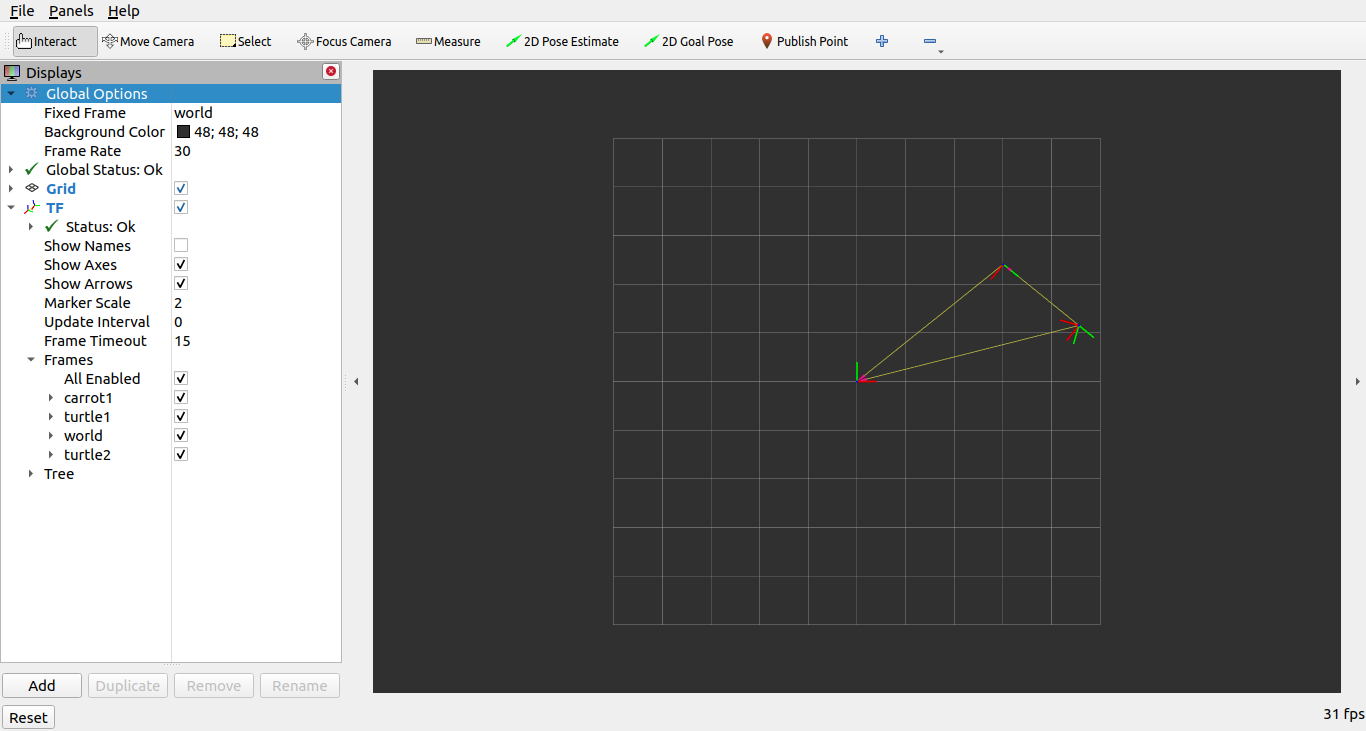
또한 RViz도 시작됩니다. 이 RViz는 모든 터틀 프레임을 world 프레임에 대해 표시합니다. 이 월드의 원점은 왼쪽 아래 모퉁이에 있습니다.