하드웨어 체크
목표: 로봇의 하드웨어 상태를 확인하고 해결한다.
이 과정에서는 로봇의 하드웨어 상태를 확인하고 각각의 문제마다 해결할 수 있는 방법에 대해 설명하겠습니다.
전제조건
로봇의 조립완료
ROS2 설치 완료
zeta2_bringup 패키지 설치 완료
로봇 하드웨서 스펙 학습 완료
로봇의 구성요소
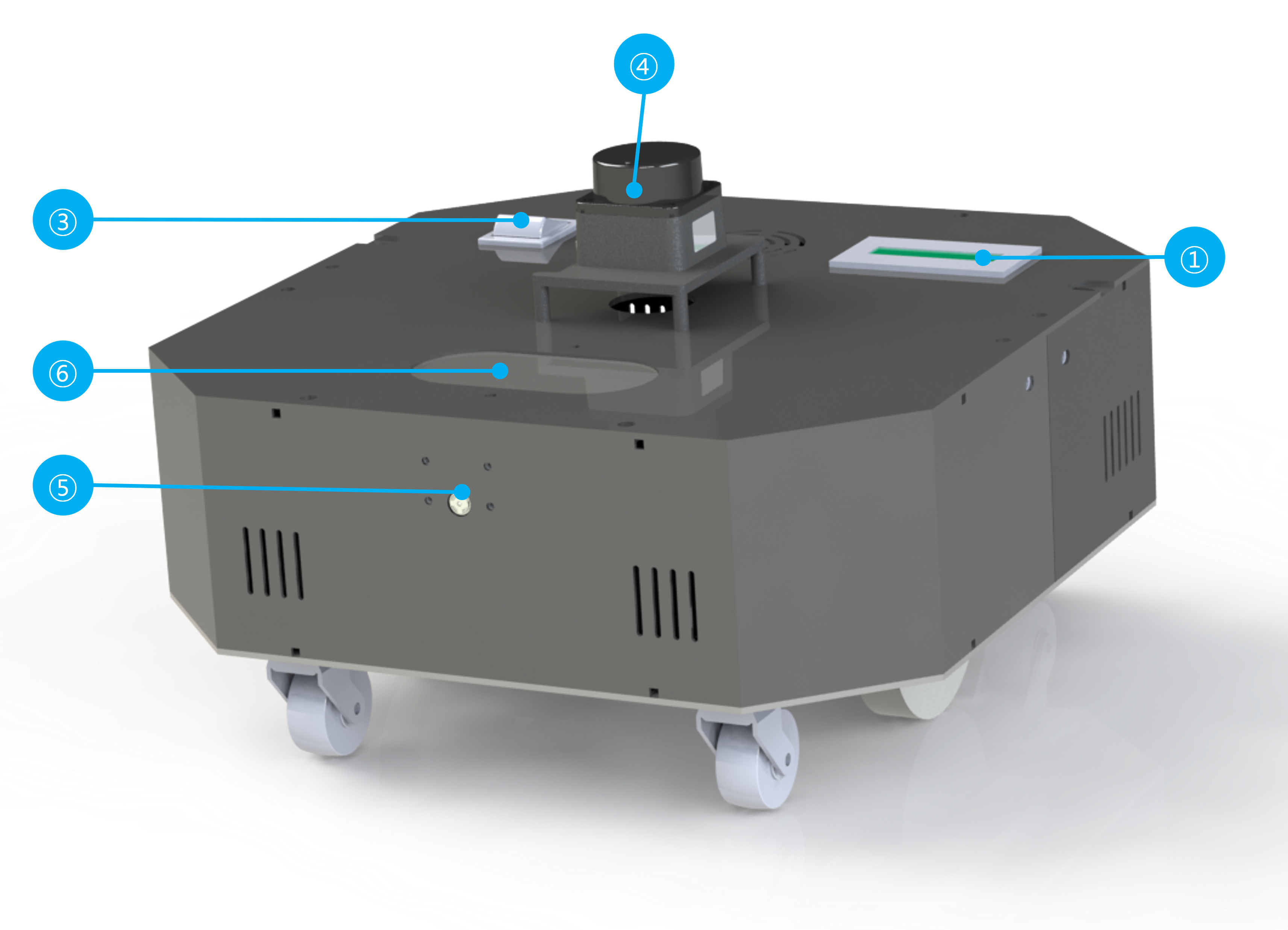

앞에서 학습했듯이 로봇엔 ① 배터리 표시기 ② 충전 포트 ③ 전원 스위치 ④ LD06 Lidar ⑤ 라즈베리파이 카메라 ⑥ 스피커 과 같은 다양한 구성 요소들이 있습니다.
하나하나 상태를 확인하고 어떻게 조치 할 수 있는지 알아봅시다.
1 배터리 표시기, 충전포트, 전원스위치
이 세가지 부품에 문제가 있으면 가장 먼저 의심해볼 수 있는 것은 접선 불량 혹은 단선입니다.
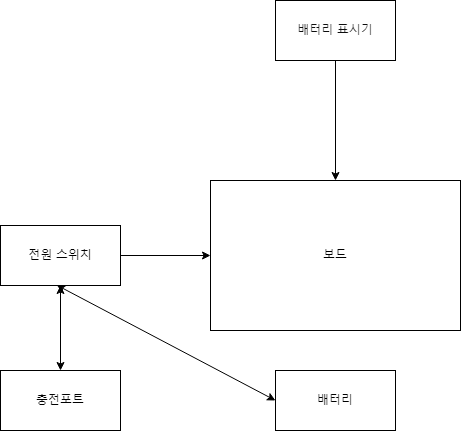
이 부품들은 이렇게 이루어져 있습니다.
모드를 중심으로 배터리 표시기가 연결되어 있고 전원 스위치가 연결되어 있습니다.
전원 스위치에 충전포트가 연결되어 있고 충전포트와 배터리가 같이 연결되어 있습니다.
어느 한 부품의 선이 어딘가에서 끊겼거나 연결이 제대로 되지 않았다면 그 부품은 제대로 작동하지 않을 것 입니다.
선을 새로 납땜을 하거나 그래도 안된다면 부품을 교체해야 합니다.
2 스피커
스피커는 가장 쉽게 테스트 해볼 수 있습니다.
스피커는 로봇의 라즈베리 파이에 연결되어 있습니다.
로봇의 전원이 잘 들어오고 키보드와 마우스 모니터까지 잘 연결이 된다면 테스트 해볼 수 있습니다.
테스트
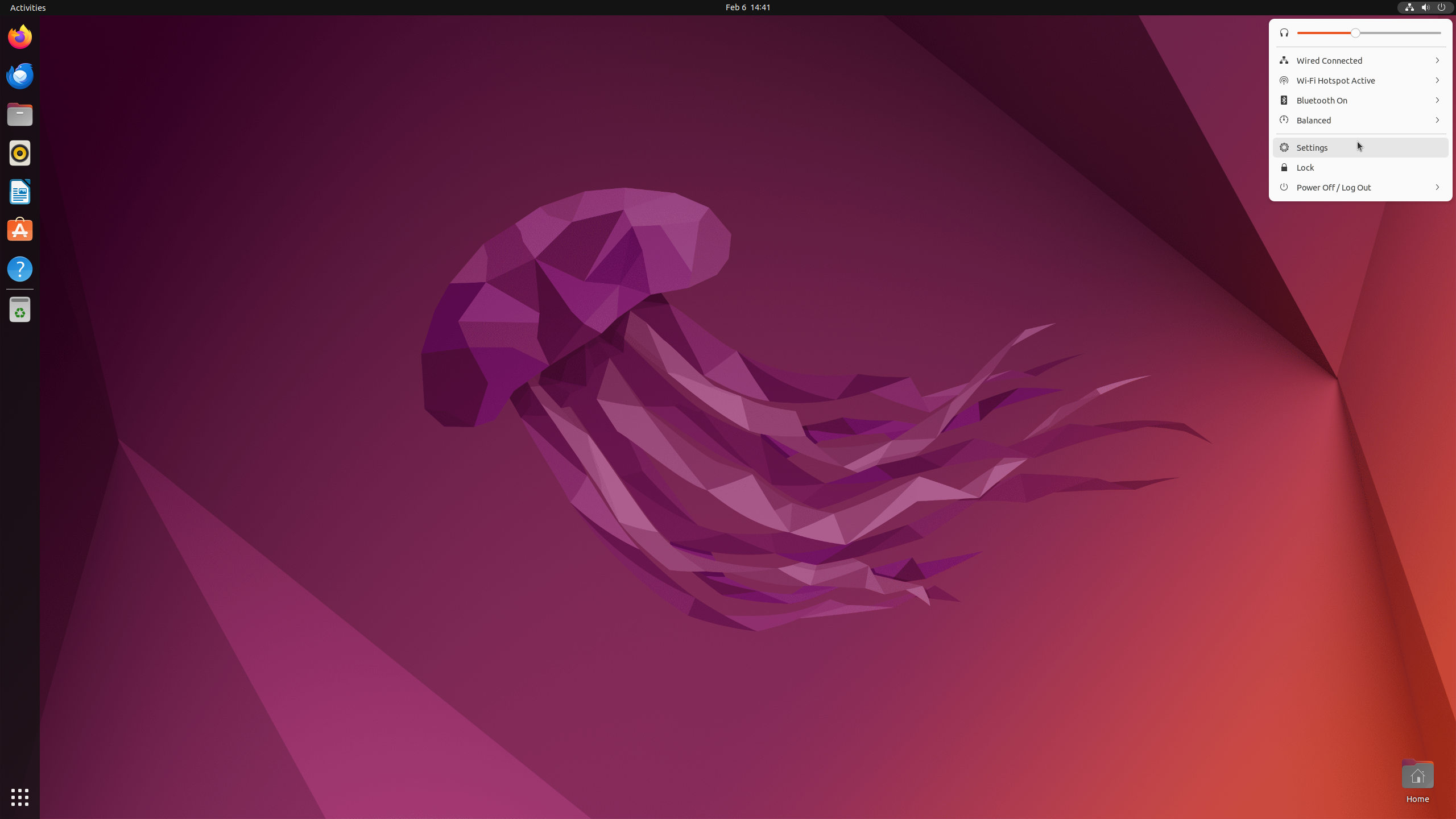
먼저 처음 WiFi 세팅할 때 처럼 우측 상단 부분을 클릭합니다.
다음으로 setting 을 클릭합니다.
다음과 같은 화면이 나오고
내려서 Sound를 선택합니다.
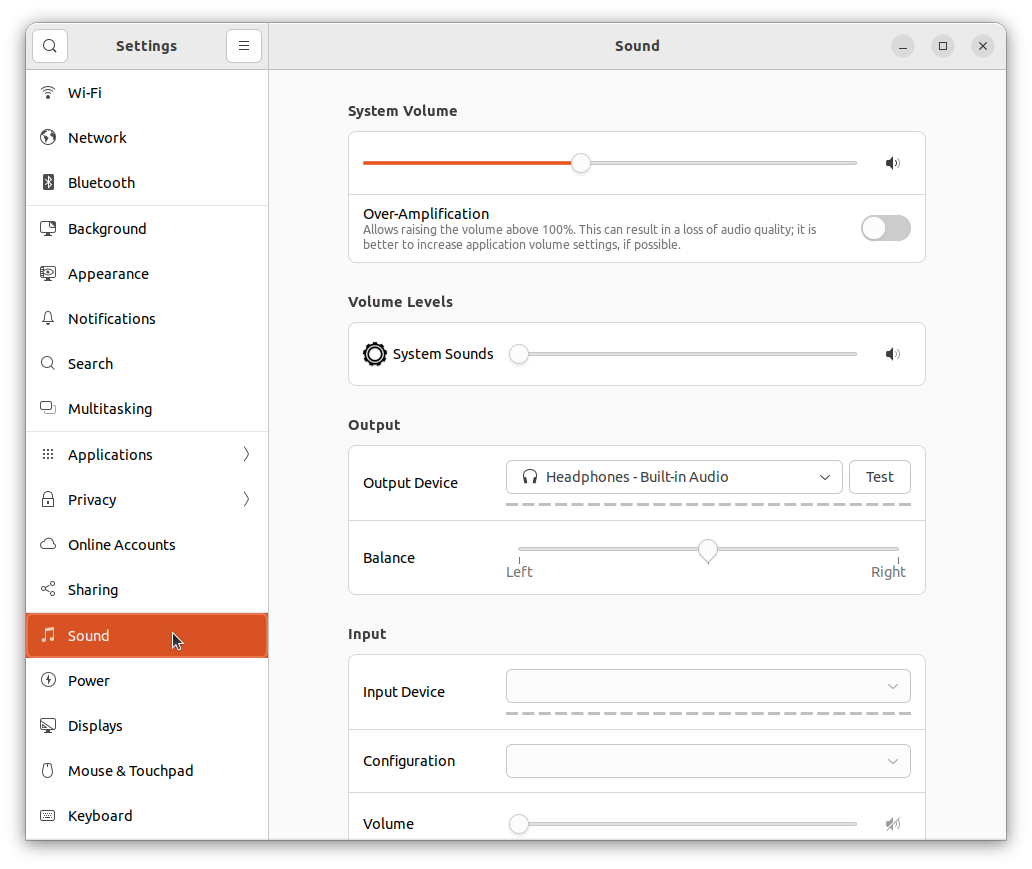
Output Device 에서 UACDemoV1.0을 아무거나 선택해줍니다.
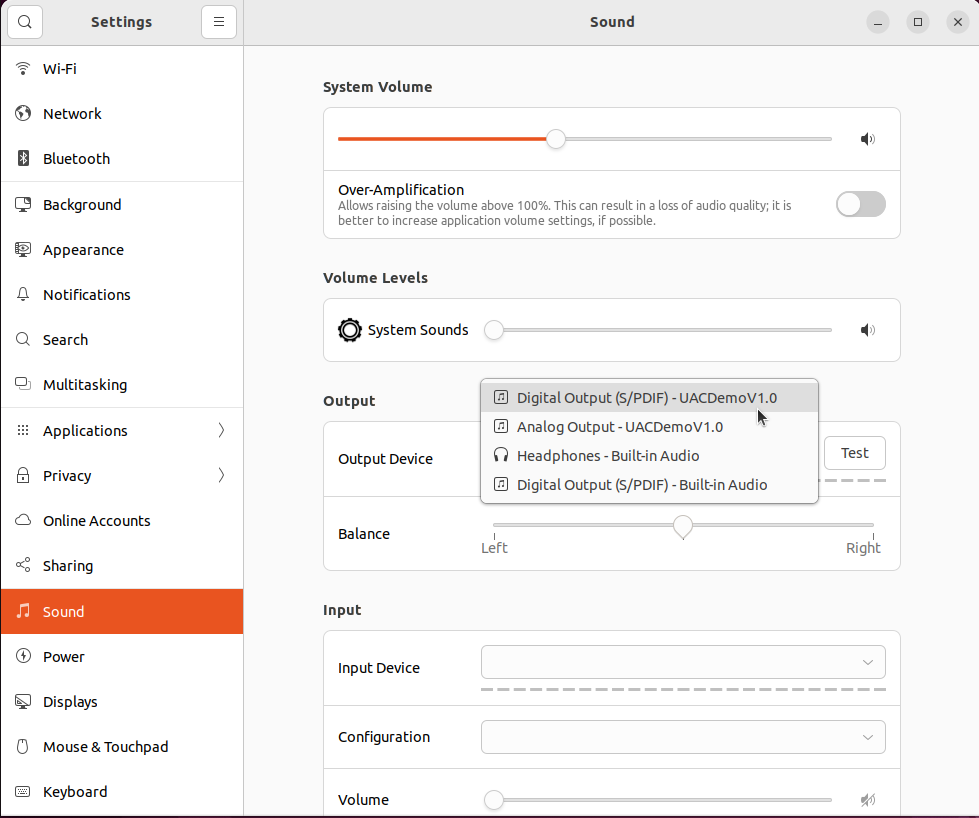
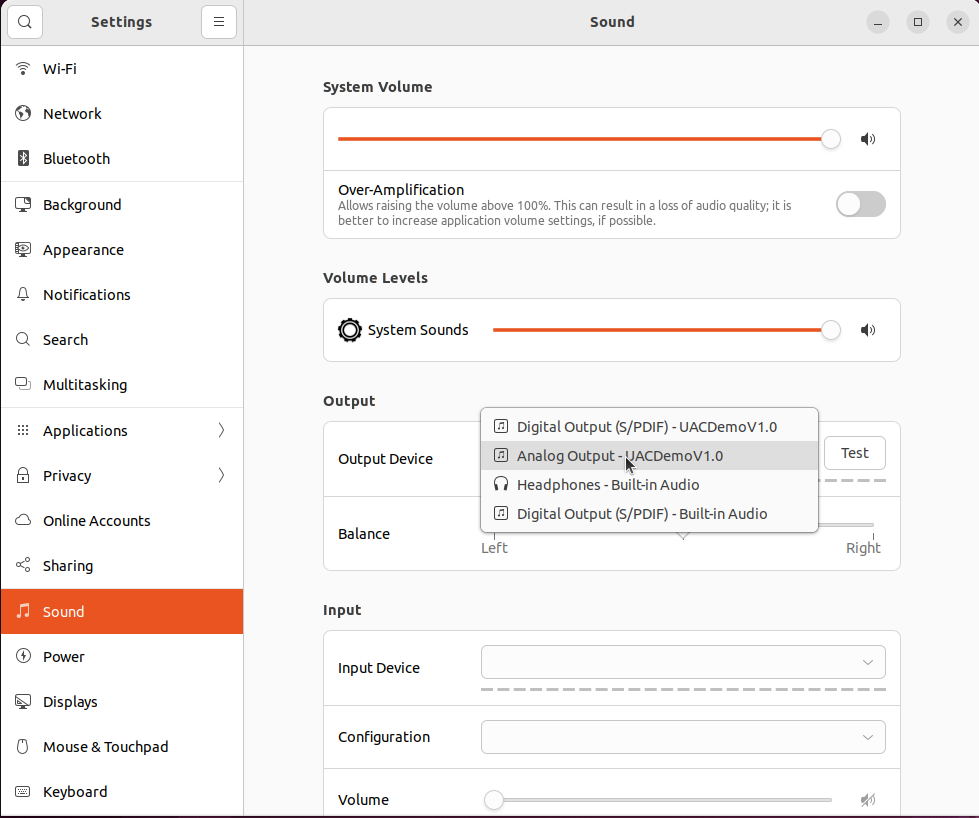
볼륨이 작으면 위에 볼륨을 다 올려주면 됩니다.
Test 를 누르고 Left Test와 Right Test를 한 다음
볼륨을 다 올렸는데도 소리가 나오지 않는다면 스피커를 교체해야 합니다.
3 카메라
카메라는 먼저 장치를 인식하는지 확인을 해야 합니다.
ll /dev/video*
비디오들의 목록을 확인하는 명령어를 처음 입력하면 많은 비디오들이 나올텐데 우리가 원하는 비디오 장치는 0번입니다.
현재 로봇엔 라즈베리파이 카메라가 장착되어 있습니다.
카메라를 인식시키기 위해서는 일단 raspi-config 를 사용해야 합니다.
라이다 설정할 때 사용했던 도구 입니다.
sudo apt install raspi-config
sudo raspi-config
Interface Options
Legacy Camera
YES Would you like to enable legacy camera support?
"The serial login shell is enabled, The serial interface is enabled"
리부팅 후
이를 비디오 장치로 인식 시키기 위해서는 v4l-utils 가 필요합니다.
설치 방법은 아래와 같습니다.
sudo apt update
sudo apt install v4l-utils
장치가 인식 된다면 아래와 같이 나올 것입니다.
ll /dev/video*
카메라 출력을 보고 싶으면 출력을 도와주는 패키지를 설치해야 합니다. 여기선 ffmpeg 를 사용하겠습니다.
sudo apt update
sudo apt install ffmpeg
아래의 명령어를 입력하여 재생새켜 줍니다.
ffplay /dev/video0
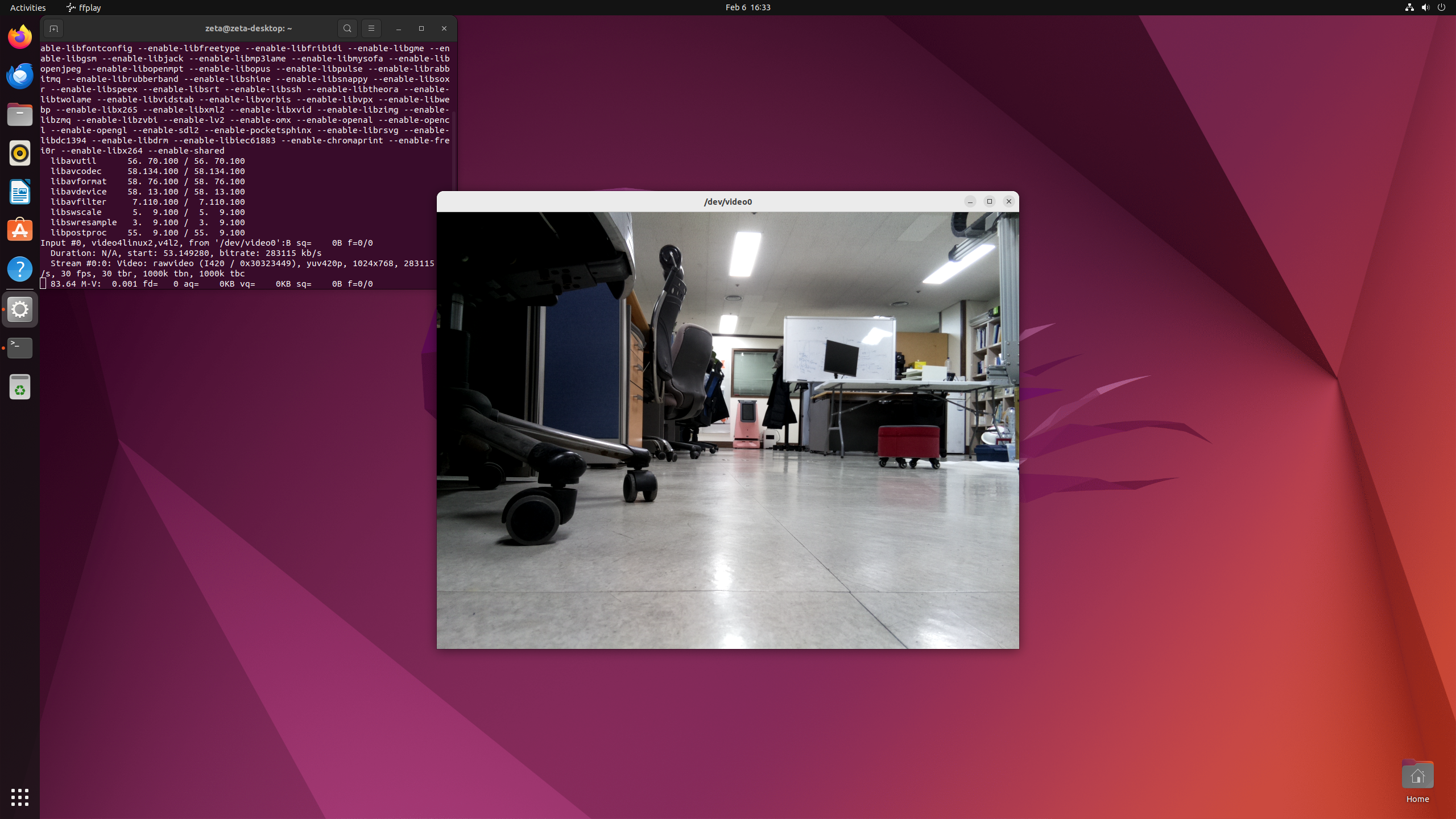
만약 카메라가 안나온다면 위의 raspi-config 설정을 다시 해보세요.
장치가 전혀 인식되지 않는다면 카메라의 고장이니 카메라를 교체해야 합니다.
4 라이다
라이다는 zeta2_bringup 을 했다면 잘 나오는걸 알 수 있을 것이다.
그래도 일단 확인을 하는 방법은
zeta2_bringup 을 설치하고 zeta2_bringup.launch.py 를 실행하는 대신에
ros2 launch ldlidar ldlidar.launch.py serial_port:=/dev/ttyS0
라이다 패키지만 따로 실행을 해보는 것이다.
그리고 /scan 데이터가 잘 올라오는지 확인하면 된다.
ros2 topic hz /scan
average rate: 10.001
min: 0.100s max: 0.100s std dev: 0.00016s window: 12
average rate: 10.001
min: 0.100s max: 0.100s std dev: 0.00012s window: 22
average rate: 10.001
min: 0.100s max: 0.100s std dev: 0.00013s window: 33
10hz의 속도로 잘 나오는 것을 확인할 수 있다.
데이터를 보고 싶다면
ros2 topic echo /scan
header:
stamp:
sec: 1707205361
nanosec: 897271814
frame_id: base_scan
angle_min: 0.0
angle_max: 6.2831854820251465
angle_increment: 0.01392383687198162
time_increment: 0.0
scan_time: 0.0
range_min: 0.004999999888241291
range_max: 15.0
ranges:
- 9.35200023651123
- 9.880000114440918
- 9.848999977111816
- 9.833000183105469
- 9.848999977111816
- 9.833000183105469
- 9.833000183105469
- .inf
- .inf
- .inf
- .inf
'
'
'
'
이런 식으로 /scan 데이터가 올라오는 것을 확인 할 수 있다.
만약 ll /dev/ttyS0 이 없다면 zeta2_bringup 의 라이다 과정을 다시해보고
그래도 나타나지 않는다면 연결 확인을 다시 한다.
그럼에도 나타나지 않는다면 교체해야 한다.
5 모터 혹은 IMU
이 두 가지가 안되는 경우가 조금 큰 문제이다.
가장 먼저 할 수 있는건 권한을 줘보는 것이다.
ll /dev/ttyUSB*
sudo chmod 777 /dev/ttyUSB*
권한을 줬는데도 해결되지 않는다면 일단 로봇을 재부팅 해본다.
그럼에도 해결되지 않는다면 로봇을 본사로 가지고 가서 확인을 해봐야 할 것이다.
요약
로봇의 구성하는 하드웨어 장치들을 확인하고 문제가 생겼을 경우 어떻게 해결할 수 있을지에 대해서 배웠습니다.